07 August 2020
Novel multi-arm robot developed for eye interventions
Researchers have developed a multi-arm robot successfully tested in a clinical scenario

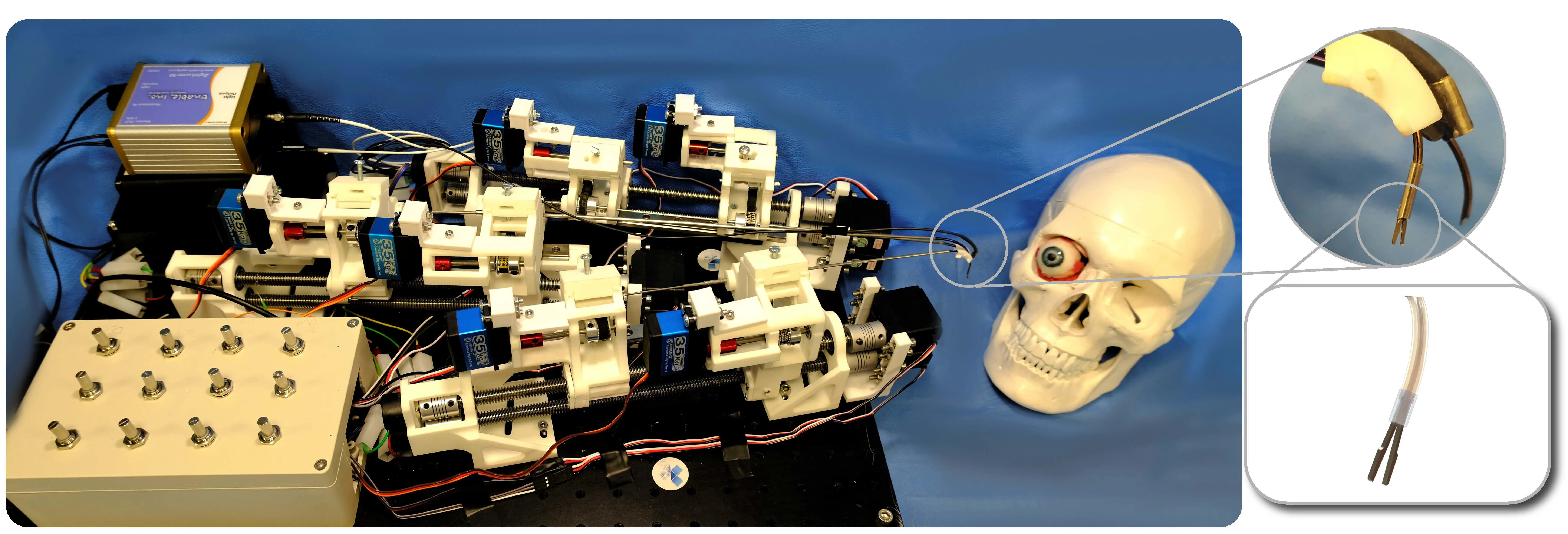
Researchers from the School of Biomedical Engineering & Imaging Sciences have for the first time built a flexible multi-arm continuum robot with a vision module and two surgical tools to be used by surgeons in deep orbital interventions.
PhD student Zisos Mitros, under the guidance of Dr Christos Bergeles, Deputy Director of the Centre for Doctoral Training on Surgical and Interventional Engineering, and Professor Lyndon Da Cruz, from Moorfields Eye Hospital, developed the multi-arm continuum robot for eye interventions that overcomes key challenges frequently cited by clinicians, including limited surgical workspace, lack of articulation, limited dexterity and tool flexibility and danger of instrument clash.
Mr Mitros said currently surgeons separate the medial rectus muscle from the eye globe, which requires extensive manipulation.
“This complicates the surgery and increases the chance of inadvertent tissue damage, as the surgeons make a small incision of 1-2 mm on the optic nerve in order to decrease the optic pressure,” he said.
“Such a small incision can be performed by a flexible tool minimizing the danger of tissue damage.”
Built in-house at the School’s engineering workshops over two years under clinician guidance, the multi-arm robot has now successfully been used in a clinical scenario to prove the concept of accessing the eye orbit and performing surgery on the optic nerve.
Researchers from the School of Biomedical Engineering & Imaging Sciences have for the first time built a flexible multi-arm continuum robot with a vision module and two surgical tools to be used by surgeons in deep orbital interventions.
PhD student Zisos Mitros, under the guidance of Dr Christos Bergeles, Deputy Director of the Centre for Doctoral Training on Surgical and Interventional Engineering, and Professor Lyndon Da Cruz, from Moorfields Eye Hospital, developed the multi-arm continuum robot for eye interventions that overcomes key challenges frequently cited by clinicians, including limited surgical workspace, lack of articulation, limited dexterity and tool flexibility and danger of instrument clash.
Mr Mitros said currently surgeons separate the medial rectus muscle from the eye globe, which requires extensive manipulation.
“This complicates the surgery and increases the chance of inadvertent tissue damage, as the surgeons make a small incision of 1-2 mm on the optic nerve in order to decrease the optic pressure,” he said.
“Such a small incision can be performed by a flexible tool minimizing the danger of tissue damage.”
Built in-house at the School’s engineering workshops over two years under clinician guidance, the multi-arm robot has now successfully been used in a clinical scenario to prove the concept of accessing the eye orbit and performing surgery on the optic nerve.